Python读取图片属性信息的实现方法
本文是利用Python脚本读取图片信息,有几个说明如下:
1、没有实现错误处理
2、没有读取所有信息,大概只有 GPS 信息、图片分辨率、图片像素、设备商、拍摄设备等
3、简单修改后应该能实现暴力修改图片的 GPS 信息
4、但对于本身没有 GPS 信息的图片,实现则非常复杂,需要仔细计算每个描述符的偏移量
脚本运行后,读取结果如下
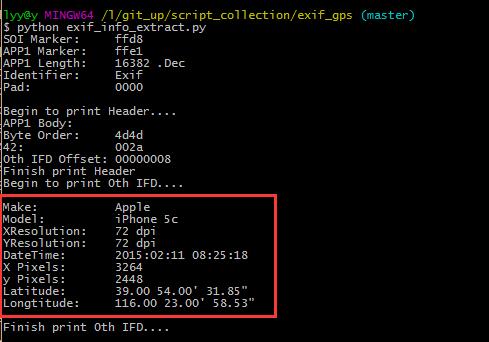
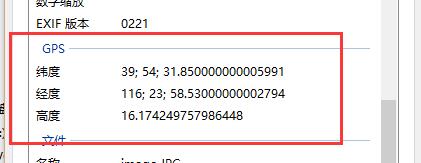
脚本读取的信息
这里和 Windows 属性查看器读到的内容完全一致

图片信息1
图片信息2
源码如下
# -*- coding:utf-8 -*-
import binascii
class ParseMethod(object):
@staticmethod
def parse_default(f, count, offset):
pass
@staticmethod
def parse_latitude(f, count, offset):
old_pos = f.tell()
f.seek(12 + offset)
latitude = [0,0,0]
for i in xrange(count):
byte = f.read(4)
numerator = byte.encode('hex')
byte = f.read(4)
denominator = byte.encode('hex')
latitude[i] = float(int(numerator, 16)) / int(denominator, 16)
print 'Latitude:\t%.2f %.2f\' %.2f\"' % (latitude[0], latitude[1], latitude[2])
f.seek(old_pos)
@staticmethod
def parse_longtitude(f, count, offset):
old_pos = f.tell()
f.seek(12 + offset)
longtitude = [0,0,0]
for i in xrange(count):
byte = f.read(4)
numerator = byte.encode('hex')
byte = f.read(4)
denominator = byte.encode('hex')
longtitude[i] = float(int(numerator, 16)) / int(denominator, 16)
print 'Longtitude:\t%.2f %.2f\' %.2f\"' % (longtitude[0], longtitude[1], longtitude[2])
f.seek(old_pos)
@staticmethod
def parse_make(f, count, offset):
old_pos = f.tell()
f.seek(12 + offset)
byte = f.read(count)
a = byte.encode('hex')
print 'Make:\t\t' + binascii.a2b_hex(a)
f.seek(old_pos)
@staticmethod
def parse_model(f, count, offset):
old_pos = f.tell()
f.seek(12 + offset)
byte = f.read(count)
a = byte.encode('hex')
print 'Model:\t\t' + binascii.a2b_hex(a)
f.seek(old_pos)
@staticmethod
def parse_datetime(f, count, offset):
old_pos = f.tell()
f.seek(12 + offset)
byte = f.read(count)
a = byte.encode('hex')
print 'DateTime:\t' + binascii.a2b_hex(a)
f.seek(old_pos)
# rational data type, 05
@staticmethod
def parse_xresolution(f, count, offset):
old_pos = f.tell()
f.seek(12 + offset)
byte = f.read(4)
numerator = byte.encode('hex')
byte = f.read(4)
denominator = byte.encode('hex')
xre = int(numerator, 16) / int(denominator, 16)
print 'XResolution:\t' + str(xre) + ' dpi'
f.seek(old_pos)
@staticmethod
def parse_yresolution(f, count, offset):
old_pos = f.tell()
f.seek(12 + offset)
byte = f.read(4)
numerator = byte.encode('hex')
byte = f.read(4)
denominator = byte.encode('hex')
xre = int(numerator, 16) / int(denominator, 16)
print 'YResolution:\t' + str(xre) + ' dpi'
f.seek(old_pos)
@staticmethod
def parse_exif_ifd(f, count, offset):
old_pos = f.tell()
f.seek(12 + offset)
byte = f.read(2)
a = byte.encode('hex')
exif_ifd_number = int(a, 16)
for i in xrange(exif_ifd_number):
byte = f.read(2)
tag_id = byte.encode('hex')
#print tag_id,
byte = f.read(2)
type_n = byte.encode('hex')
#print type_n,
byte = f.read(4)
count = byte.encode('hex')
#print count,
byte = f.read(4)
value_offset = byte.encode('hex')
#print value_offset
value_offset = int(value_offset, 16)
EXIF_IFD_DICT.get(tag_id, ParseMethod.parse_default)(f, count, value_offset)
f.seek(old_pos)
@staticmethod
def parse_x_pixel(f, count, value):
print 'X Pixels:\t' + str(value)
@staticmethod
def parse_y_pixel(f, count, value):
print 'y Pixels:\t' + str(value)
@staticmethod
def parse_gps_ifd(f, count, offset):
old_pos = f.tell()
f.seek(12 + offset)
byte = f.read(2)
a = byte.encode('hex')
gps_ifd_number = int(a, 16)
for i in xrange(gps_ifd_number):
byte = f.read(2)
tag_id = byte.encode('hex')
#print tag_id,
byte = f.read(2)
type_n = byte.encode('hex')
#print type_n,
byte = f.read(4)
count = byte.encode('hex')
#print count,
byte = f.read(4)
value_offset = byte.encode('hex')
#print value_offset
count = int(count, 16)
value_offset = int(value_offset, 16)
GPS_IFD_DICT.get(tag_id, ParseMethod.parse_default)(f, count, value_offset)
f.seek(old_pos)
IFD_dict = {
'010f' : ParseMethod.parse_make ,
'0110' : ParseMethod.parse_model ,
'0132' : ParseMethod.parse_datetime ,
'011a' : ParseMethod.parse_xresolution ,
'011b' : ParseMethod.parse_yresolution ,
'8769' : ParseMethod.parse_exif_ifd ,
'8825' : ParseMethod.parse_gps_ifd
}
EXIF_IFD_DICT = {
'a002' : ParseMethod.parse_x_pixel ,
'a003' : ParseMethod.parse_y_pixel
}
GPS_IFD_DICT = {
'0002' : ParseMethod.parse_latitude ,
'0004' : ParseMethod.parse_longtitude
}
with open('image.jpg', 'rb') as f:
byte = f.read(2)
a = byte.encode('hex')
print 'SOI Marker:\t' + a
byte = f.read(2)
a = byte.encode('hex')
print 'APP1 Marker:\t' + a
byte = f.read(2)
a = byte.encode('hex')
print 'APP1 Length:\t' + str(int(a, 16)) + ' .Dec'
byte = f.read(4)
a = byte.encode('hex')
print 'Identifier:\t' + binascii.a2b_hex(a)
byte = f.read(2)
a = byte.encode('hex')
print 'Pad:\t\t' + a
print
print 'Begin to print Header.... '
print 'APP1 Body: '
byte = f.read(2)
a = byte.encode('hex')
print 'Byte Order:\t' + a
byte = f.read(2)
a = byte.encode('hex')
print '42:\t\t' + a
byte = f.read(4)
a = byte.encode('hex')
print '0th IFD Offset:\t' + a
print 'Finish print Header'
print 'Begin to print 0th IFD....'
print
#print 'Total: ',
byte = f.read(2)
a = byte.encode('hex')
interoperability_number = int(a, 16)
#print interoperability_number
for i in xrange(interoperability_number):
byte = f.read(2)
tag_id = byte.encode('hex')
#print tag_id,
byte = f.read(2)
type_n = byte.encode('hex')
#print type_n,
byte = f.read(4)
count = byte.encode('hex')
#print count,
byte = f.read(4)
value_offset = byte.encode('hex')
#print value_offset
count = int(count, 16)
value_offset = int(value_offset, 16)
# simulate switch
IFD_dict.get(tag_id, ParseMethod.parse_default)(f, count, value_offset)
print
print 'Finish print 0th IFD....'
总结
利用Python读取图片属性信息的实现方法到这就基本结束了,大家都学会了吗?希望这篇文章对大家的学习或者工作带来一定的帮助,