python微信跳一跳系列之色块轮廓定位棋盘
在前几篇博文中,我们分别采用颜色识别,模板匹配,像素遍历等方法实现了棋子和棋盘的定位,具体内容可以参见我的前面的文章内容,在这一篇中,我们来探索一种定位棋盘的新方法。
分析
经过观察,我们看到,无论什么情况下,棋盘和背景之间总是存在着非常明显的色彩对比,这当然是必须的,否则玩游戏的人都无法分辨棋子、棋盘、背景,这个游戏就不可能大火。显然,如果我们将每一幅画面进行色块分割,将彩色图转变为黑白二值图,就可以将背景和棋盘隔离出来,然后对黑白图中的白色轮廓进行分析,将其中位置最高(y值最小)的轮廓标记出来,这个轮廓就是下一步要跳一跳的棋盘。
步骤
- 抓取图像;
- 将图像转变为灰度图;
- 确定工作区域(h//3–2h//3),确定像素阈值;
- 产生黑白二值图像,同时产生两种黑白图,分别将亮于背景和暗于背景两种情况下的色块隔离出来;
阴影的处理
棋盘往往会有阴影,可以通过进一步缩小目标区域进行色块分割的方法来精准实现定位,感兴趣的同学可以自行练习。
代码
# -*- coding: utf-8 -*-
#VS2017+python3.6+opencv3.4
#2018.02.03
#作者:艾克思
import cv2
def thresh(img):
x1,y1,w1,h1,x2,y2,w2,h2=0,0,0,0,0,0,0,0
gray= cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
#gray=cv2.GaussianBlur(gray,(13,13),0) #高斯模糊
h0,w0=img.shape[:2]
top=gray[h0//3,10]
bottom= gray[h0*2//3,10]
thresh1 = cv2.threshold(gray,top,255, cv2.THRESH_BINARY)[1]
thresh2 = cv2.threshold(gray,bottom,255, cv2.THRESH_BINARY_INV)[1]
img1=thresh1[h0//3:h0*2//3,0:w0]
img2=thresh2[h0//3:h0*2//3,0:w0]
cnts1, hierarchy1, rr1 = cv2.findContours(img1,cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE)
cnts2, hierarchy2, rr2 = cv2.findContours(img2,cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE)
aim1=0
y_min=h0//3
for c in hierarchy1:
if hierarchy1==None:
x1,y1,w1,h1=w0//2,h0//3,w0//3,h0//3
break
else:
x,y,w,h = cv2.boundingRect(c)
if y<=y_min:
y_min=y
aim1=c
x1,y1,w1,h1 = cv2.boundingRect(aim1)
cv2.rectangle(img,(x1,y1+h0//3),(x1+w1,y1+h1+h0//3),(255,0,0),2)
aim2=0
y_min=h0//3
for c in hierarchy2:
if hierarchy2==None:
x2,y2,w2,h2=w0//2,h0//3,w0//3,h0//3
break
else:
x,y,w,h = cv2.boundingRect(c)
if y<=y_min:
y_min=y
aim2=c
x2,y2,w2,h2 = cv2.boundingRect(aim2)
cv2.rectangle(img,(x2,y2+h0//3),(x2+w2,y2+h2+h0//3),(0,255,0),2)
if y1+h1//2<=y2+h2//2:
x,y,w,h=x1,y1,w1,h1
else: x,y,w,h=x2,y2,w2,h2
cv2.imshow('img1',thresh1)
cv2.imshow('img2',thresh2)
return (x+w//2,y+h0//3+h//2)
def main():
video='jump.avi'
cap = cv2.VideoCapture(video)
ret=cap.isOpened()
ret=True
while ret:
#ret,img=cap.read() #读入帧
img=cv2.imread('e:/python/jump/hsv/006.png')
if not ret:cv2.waitKey(0)
point=thresh(img)
cv2.circle(img,point,3,(0,0,255),-1)
cv2.circle(img,point,15,(0,0,255),2)
cv2.imshow('img',img)
if cv2.waitKey(25)==ord('q'): break
cap.release()
cv2.destroyAllWindows()
if __name__=='__main__':
main()
opencv中关于黑白二值分割的参数类型如下:
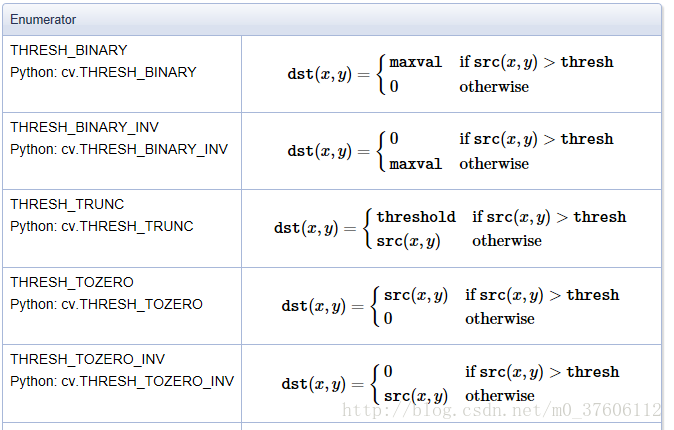
在代码编制时,需要将cv2.THRESH_BINARY和cv2.THRESH_BINARY_INV联合使用,以便同时分辨亮色和暗色。
效果
我们放几张棋盘识别的样例,共大家参考。
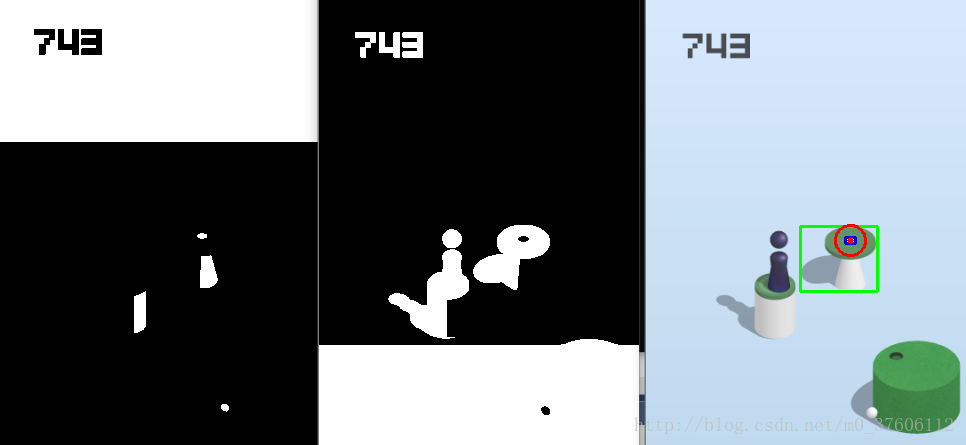
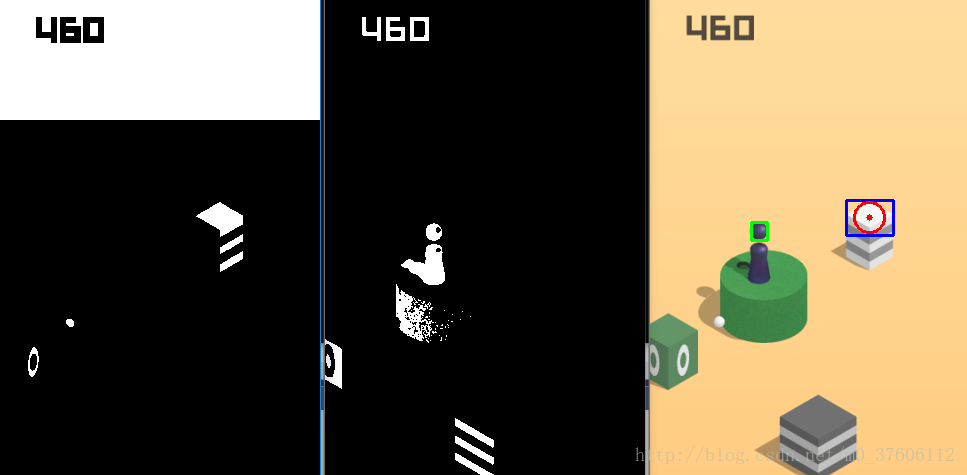
这是一张比较典型的样例图,棋盘上半部分为暗色,下半部分为亮色,第一张是亮色部分的分割识别,第二张是暗色部分的分割识别,最后分别绘出各自识别出的色块轮廓,并进行比较。这张样例中,最终识别出的位置在棋盘的中心白点上,效果还是非常好的。
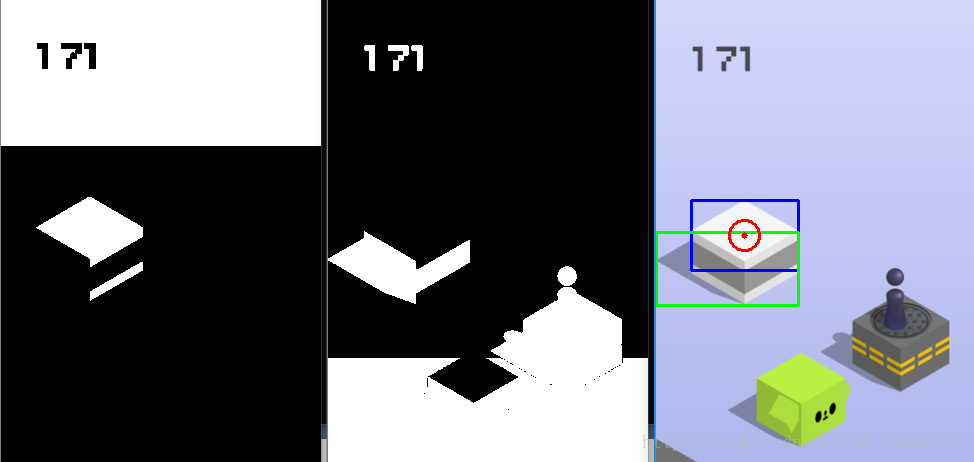
这也是一张非常典型的样例图,棋盘亮暗部分相互交错,左边图识别出了亮色部分,中间图识别出了暗色部分,最终的比较结果也在棋盘的正中心,效果不错。
这张样例也将最终的位置锁定在棋盘中心点。
再放一张。
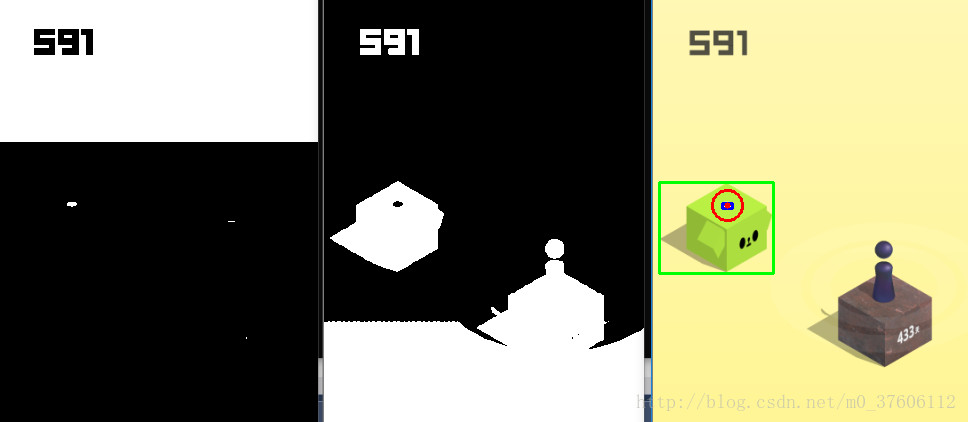
这也是一张比较典型的情况,最终定位在棋盘的中心白点处,方法可行。
以上就是本文的全部内容,希望对大家的学习有所帮助,也希望大家多多支持【听图阁-专注于Python设计】。