Python3利用Dlib19.7实现摄像头人脸识别的方法
0.引言
利用python开发,借助Dlib库捕获摄像头中的人脸,提取人脸特征,通过计算欧氏距离来和预存的人脸特征进行对比,达到人脸识别的目的;
可以自动从摄像头中抠取人脸图片存储到本地,然后提取构建预设人脸特征;
根据抠取的 / 已有的同一个人多张人脸图片提取128D特征值,然后计算该人的128D特征均值;
然后和摄像头中实时获取到的人脸提取出的特征值,计算欧氏距离,判定是否为同一张人脸;
人脸识别 / face recognition的说明:
wikipedia 关于人脸识别系统 / face recognition system 的描述:theywork by comparing selected facial featuresfrom given image with faces within a database.
本项目中就是比较 预设的人脸的特征和 摄像头实时获取到的人脸的特征;
核心就是提取128D人脸特征,然后计算摄像头人脸特征和预设的特征脸的欧式距离,进行比对;
效果如下(摄像头认出来我是default_person预设的人脸 / 另一个人不是预设人脸显示diff):
图1 摄像头人脸识别效果gif
1.总体流程
先说下 人脸检测 (face detection) 和 人脸识别 (face recognition) ,前者是达到检测出场景中人脸的目的就可以了,而后者不仅需要检测出人脸,还要和已有人脸数据进行比对,识别出是否在数据库中,或者进行身份标注之类处理,人脸检测和人脸识别两者有时候可能会被理解混淆;
我的之前一些项目都是用dlib做人脸检测这块,这个项目想要实现的功能是人脸识别功能,借助的是 dlib官网中 face_recognition.py这个例程 (link:http://dlib.net/face_recognition.py.html);
核心在于 利用 “dlib_face_recognition_resnet_model_v1.dat” 这个model,提取人脸图像的128D特征,然后比对不同人脸图片的128D特征,设定阈值计算欧氏距离来判断是否为同一张脸;
# face recognition model, the object maps human faces into 128D vectors
facerec = dlib.face_recognition_model_v1("dlib_face_recognition_resnet_model_v1.dat")
shape = predictor(img, dets[0])
face_descriptor = facerec.compute_face_descriptor(img, shape)
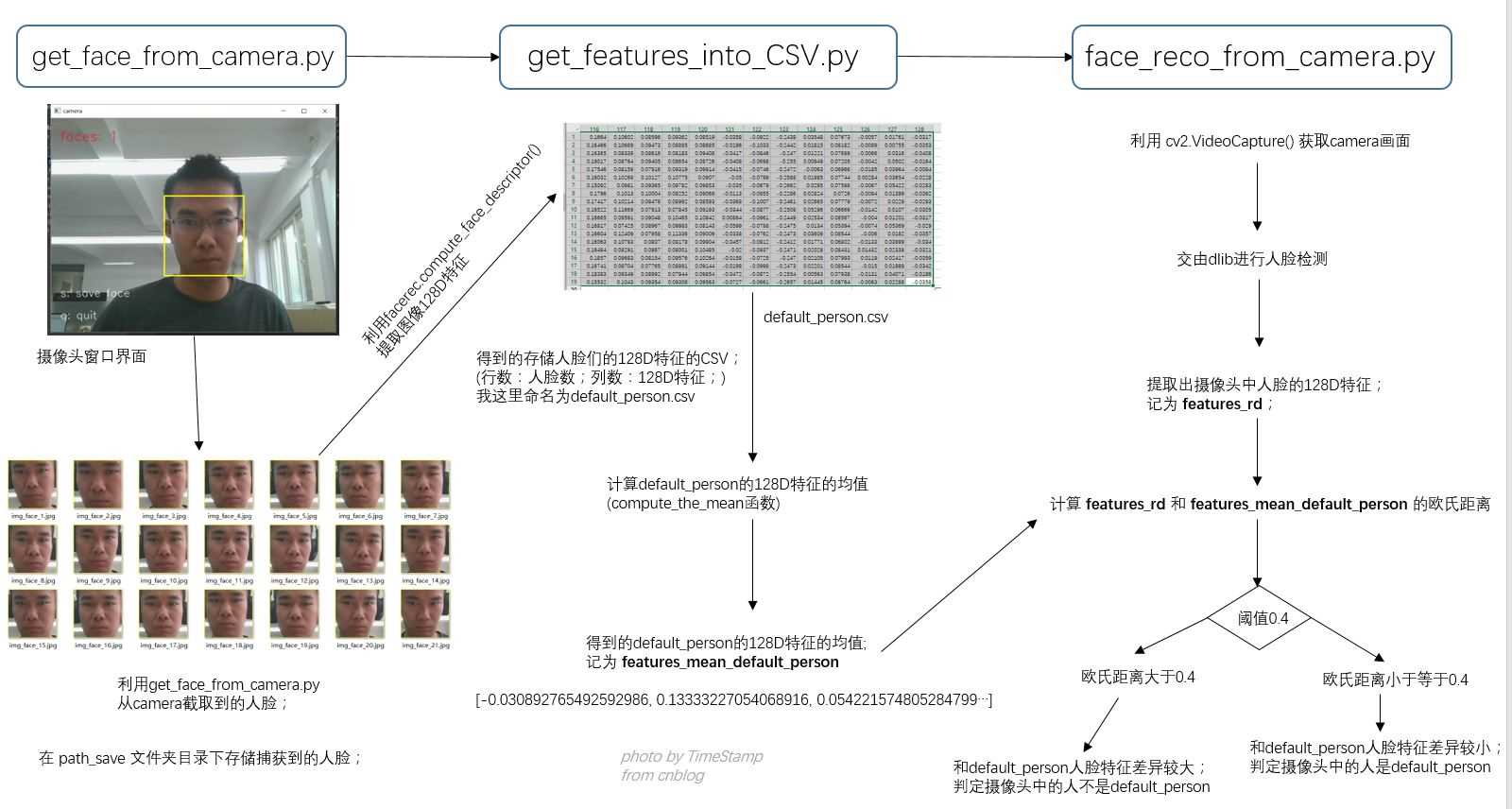
图2 总体设计流程
2.源码介绍
主要有
- get_face_from_camera.py ,
- get_features_into_CSV.py,
- face_reco_from_camera.py
这三个py文件;
2.1get_face_from_camera.py / 采集构建XXX人脸数据
人脸识别需要将 提取到的图像数据 和已有图像数据进行比对分析,所以这个py文件实现的功能就是采集构建XXX的人脸数据;
程序会生成一个窗口,显示调用的摄像头实时获取的图像(关于摄像头的调用方式可以参考我的另一博客/post/135512.htm);
按s键可以保存当前视频流中的人脸图像,保存的路径由 path_save = “xxxx/get_from_camera/” 规定;
按q键退出窗口;
摄像头的调用是利用opencv库的cv2.VideoCapture(0), 此处参数为0代表调用的是笔记本的默认摄像头,你也可以让它调用传入已有视频文件;
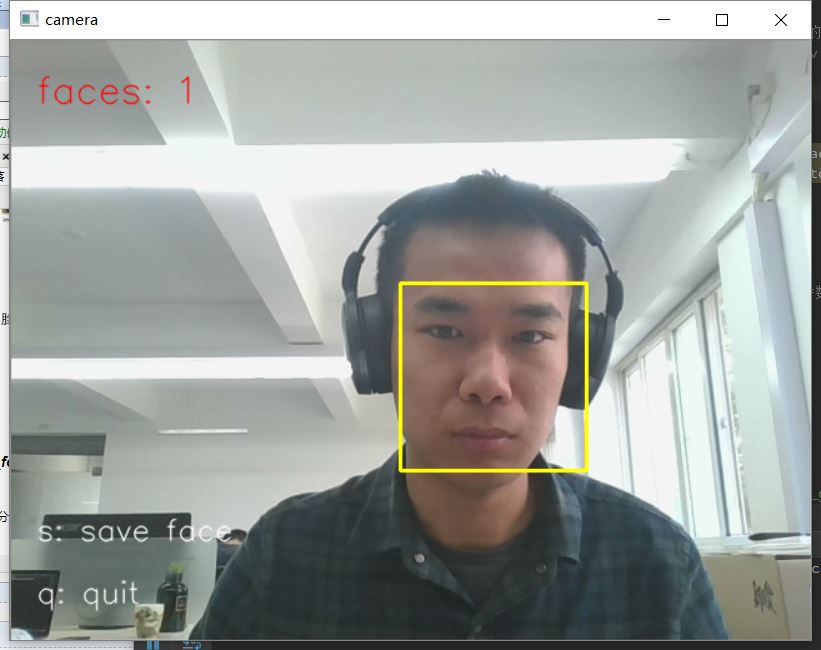
图3get_face_from_camera.py 的界面
这样的话,你就可以在 path_save指定的目录下得到一组捕获到的人脸;

图4 捕获到的一组人脸
源码如下:
# 2018-5-11
# By TimeStamp
# cnblogs: http://www.cnblogs.com/AdaminXie
import dlib # 人脸识别的库dlib
import numpy as np # 数据处理的库numpy
import cv2 # 图像处理的库OpenCv
# dlib预测器
detector = dlib.get_frontal_face_detector()
predictor = dlib.shape_predictor('shape_predictor_68_face_landmarks.dat')
# 创建cv2摄像头对象
cap = cv2.VideoCapture(0)
# cap.set(propId, value)
# 设置视频参数,propId设置的视频参数,value设置的参数值
cap.set(3, 480)
# 截图screenshoot的计数器
cnt_ss = 0
# 人脸截图的计数器
cnt_p = 0
# 保存
path_save = "F:/code/python/P_dlib_face_reco/data/get_from_camera/"
# cap.isOpened() 返回true/false 检查初始化是否成功
while cap.isOpened():
# cap.read()
# 返回两个值:
# 一个布尔值true/false,用来判断读取视频是否成功/是否到视频末尾
# 图像对象,图像的三维矩阵q
flag, im_rd = cap.read()
# 每帧数据延时1ms,延时为0读取的是静态帧
kk = cv2.waitKey(1)
# 取灰度
img_gray = cv2.cvtColor(im_rd, cv2.COLOR_RGB2GRAY)
# 人脸数rects
rects = detector(img_gray, 0)
# print(len(rects))
# 待会要写的字体
font = cv2.FONT_HERSHEY_SIMPLEX
if (len(rects) != 0):
# 检测到人脸
# 矩形框
for k, d in enumerate(rects):
# 计算矩形大小
# (x,y), (宽度width, 高度height)
pos_start = tuple([d.left(), d.top()])
pos_end = tuple([d.right(), d.bottom()])
# 计算矩形框大小
height = d.bottom() - d.top()
width = d.right() - d.left()
# 根据人脸大小生成空的图像
im_blank = np.zeros((height, width, 3), np.uint8)
im_rd = cv2.rectangle(im_rd, tuple([d.left(), d.top()]), tuple([d.right(), d.bottom()]), (0, 255, 255), 2)
im_blank = np.zeros((height, width, 3), np.uint8)
# 保存人脸到本地
if (kk == ord('s')):
cnt_p += 1
for ii in range(height):
for jj in range(width):
im_blank[ii][jj] = im_rd[d.top() + ii][d.left() + jj]
print(path_save + "img_face_" + str(cnt_p) + ".jpg")
cv2.imwrite(path_save + "img_face_" + str(cnt_p) + ".jpg", im_blank)
cv2.putText(im_rd, "faces: " + str(len(rects)), (20, 50), font, 1, (0, 0, 255), 1, cv2.LINE_AA)
else:
# 没有检测到人脸
cv2.putText(im_rd, "no face", (20, 50), font, 1, (0, 0, 255), 1, cv2.LINE_AA)
# 添加说明
im_rd = cv2.putText(im_rd, "s: save face", (20, 400), font, 0.8, (255, 255, 255), 1, cv2.LINE_AA)
im_rd = cv2.putText(im_rd, "q: quit", (20, 450), font, 0.8, (255, 255, 255), 1, cv2.LINE_AA)
# 按下q键退出
if (kk == ord('q')):
break
# 窗口显示
cv2.imshow("camera", im_rd)
# 释放摄像头
cap.release()
# 删除建立的窗口
cv2.destroyAllWindows()
2.2get_features_into_CSV.py / 提取特征存入CSV
已经得到了XXX的一组人脸图像,现在就需要把他的面部特征提取出来;
这里借助 dlib 库的 face recognition model 人脸识别模型;
# face recognition model, the object maps human faces into 128D vectors
facerec = dlib.face_recognition_model_v1("dlib_face_recognition_resnet_model_v1.dat")
# detector to find the faces
detector = dlib.get_frontal_face_detector()
# shape predictor to find the face landmarks
predictor = dlib.shape_predictor("shape_predictor_5_face_landmarks.dat")
# 读取图片
img = io.imread(path_img)
img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
dets = detector(img_gray, 1)
shape = predictor(img_gray, dets[0])
face_descriptor = facerec.compute_face_descriptor(img_gray, shape)
我们可以看下对于某张图片,face_descriptor的输出结果:
绿色框内是我们的返回128D特征的函数;
在红色框内调用该函数来计算img_face_13.jpg;
可以看到黄色框中的输出为128D的向量;
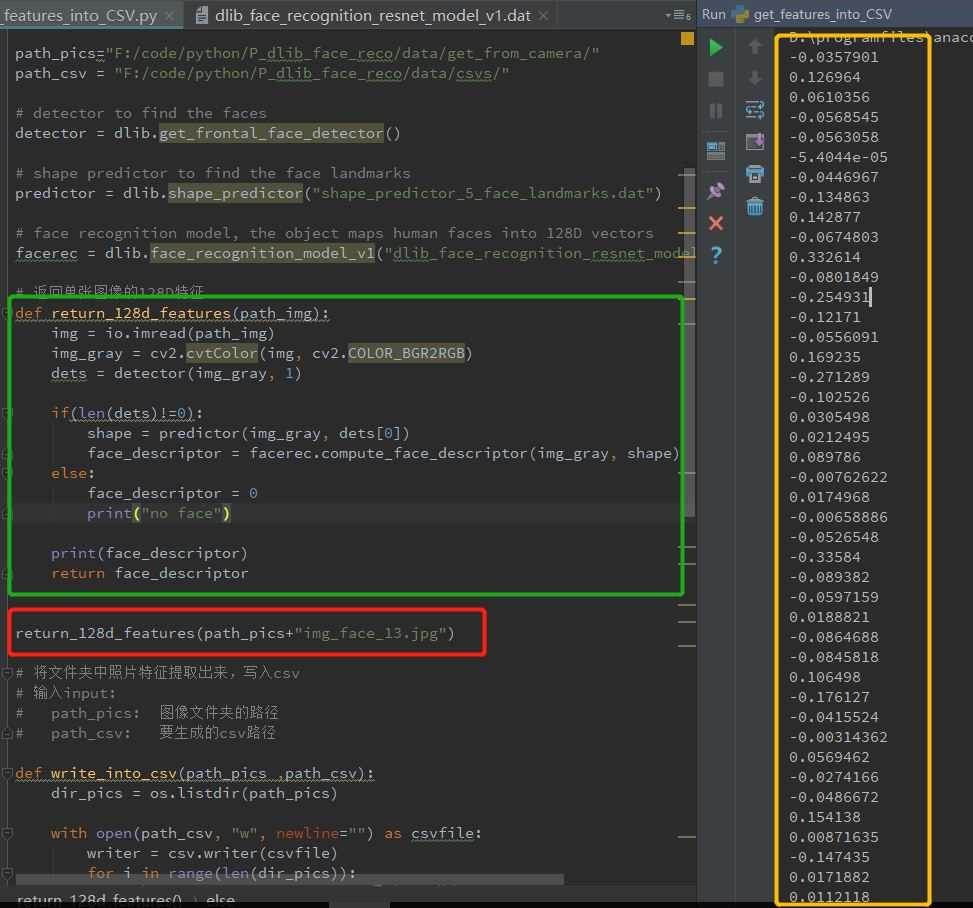
图5 返回单张图像的128D特征的计算结果
所以我们就可以把path_save中的图像,进行批量的特征计算,然后写入CSV中(利用 write_into_CSV函数),我这边csv的命名为default_person.csv;
就可以得到行数(人脸数)*128列的一个特征CSV;
这是某个人的人脸特征,然后计算128D特征的均值,求mean(利用 compute_the_mean函数)
运行的输出结果,这个128D的特征值,就是default_person的特征;
也就是我们内置/预设的人脸,之后摄像头捕获的人脸将要拿过来和这个特征值进行比对,进行人脸识别的处理;
源码:
# 2018-5-11
# By TimeStamp
# cnblogs: http://www.cnblogs.com/AdaminXie
# return_128d_features() 获取某张图像的128d特征
# write_into_csv() 将某个文件夹中的图像读取特征兵写入csv
# compute_the_mean() 从csv中读取128d特征,并计算特征均值
import cv2
import os
import dlib
from skimage import io
import csv
import numpy as np
import pandas as pd
path_pics = "F:/code/python/P_dlib_face_reco/data/get_from_camera/"
path_csv = "F:/code/python/P_dlib_face_reco/data/csvs/"
# detector to find the faces
detector = dlib.get_frontal_face_detector()
# shape predictor to find the face landmarks
predictor = dlib.shape_predictor("shape_predictor_5_face_landmarks.dat")
# face recognition model, the object maps human faces into 128D vectors
facerec = dlib.face_recognition_model_v1("dlib_face_recognition_resnet_model_v1.dat")
# 返回单张图像的128D特征
def return_128d_features(path_img):
img = io.imread(path_img)
img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
dets = detector(img_gray, 1)
if(len(dets)!=0):
shape = predictor(img_gray, dets[0])
face_descriptor = facerec.compute_face_descriptor(img_gray, shape)
else:
face_descriptor = 0
print("no face")
# print(face_descriptor)
return face_descriptor
#return_128d_features(path_pics+"img_face_13.jpg")
# 将文件夹中照片特征提取出来,写入csv
# 输入input:
# path_pics: 图像文件夹的路径
# path_csv: 要生成的csv路径
def write_into_csv(path_pics ,path_csv):
dir_pics = os.listdir(path_pics)
with open(path_csv, "w", newline="") as csvfile:
writer = csv.writer(csvfile)
for i in range(len(dir_pics)):
# 调用return_128d_features()得到128d特征
print(path_pics+dir_pics[i])
features_128d = return_128d_features(path_pics+dir_pics[i])
# print(features_128d)
# 遇到没有检测出人脸的图片跳过
if features_128d==0:
i += 1
else:
writer.writerow(features_128d)
#write_into_csv(path_pics, path_csv+"default_person.csv")
path_csv_rd = "F:/code/python/P_dlib_face_reco/data/csvs/default_person.csv"
# 从csv中读取数据,计算128d特征的均值
def compute_the_mean(path_csv_rd):
column_names = []
for i in range(128):
column_names.append("features_" + str(i + 1))
rd = pd.read_csv(path_csv_rd, names=column_names)
# 存放128维特征的均值
feature_mean = []
for i in range(128):
tmp_arr = rd["features_"+str(i+1)]
tmp_arr = np.array(tmp_arr)
# 计算某一个特征的均值
tmp_mean = np.mean(tmp_arr)
feature_mean.append(tmp_mean)
print(feature_mean)
return feature_mean
compute_the_mean(path_csv_rd)
2.3 face_reco_from_camera.py / 实时人脸识别对比分析
这个py就是调用摄像头,捕获摄像头中的人脸,然后如果检测到人脸,将摄像头中的人脸提取出128D的特征,然后和预设的default_person的128D特征进行计算欧式距离,如果比较小,可以判定为一个人,否则不是一个人;
欧氏距离对比的阈值设定,是在 return_euclidean_distance函数的dist变量;
我这里程序里面指定的是0.4,具体阈值可以根据实际情况或者测得结果进行修改;
源码:
# 2018-5-11
# By TimeStamp
# cnblogs: http://www.cnblogs.com/AdaminXie
import dlib # 人脸识别的库dlib
import numpy as np # 数据处理的库numpy
import cv2 # 图像处理的库OpenCv
# face recognition model, the object maps human faces into 128D vectors
facerec = dlib.face_recognition_model_v1("dlib_face_recognition_resnet_model_v1.dat")
# 计算两个向量间的欧式距离
def return_euclidean_distance(feature_1,feature_2):
feature_1 = np.array(feature_1)
feature_2 = np.array(feature_2)
dist = np.sqrt(np.sum(np.square(feature_1 - feature_2)))
print(dist)
if dist > 0.4:
return "diff"
else:
return "same"
features_mean_default_person = [-0.030892765492592986, 0.13333227054068916, 0.054221574805284799, -0.050820438289328626, -0.056331159841073189, 0.0039378538311116004, -0.044465327145237675, -0.13096490031794497, 0.14215188983239627, -0.084465635842398593, 0.34389359700052363, -0.062936659118062566, -0.24372901571424385, -0.13270603316394905, -0.0472818422866495, 0.15475224742763921, -0.24415240554433121, -0.11213862150907516, 0.032288033417180964, 0.023676671577911628, 0.098508275653186594, -0.010117797634417289, 0.0048202000815715448, -0.014808513420192819, -0.060100053486071135, -0.34934839135722112, -0.095795629448012301, -0.050788544706608117, 0.032316677762489567, -0.099673464894294739, -0.080181991975558434, 0.096361607705291952, -0.1823408101734362, -0.045472671817007815, -0.0066827326326778062, 0.047393877549391041, -0.038414973079373964, -0.039067085930391363, 0.15961966781239761, 0.0092458106136243598, -0.16182226570029007, 0.026322136191945327, -0.0039144184832510193, 0.2492692768573761, 0.19180528427425184, 0.022950534855848866, -0.019220497949342979, -0.15331173021542399, 0.047744840089427795, -0.17038608616904208, 0.026140184680882254, 0.19366614363695445, 0.066497623724372762, 0.07038829416820877, -0.0549700813073861, -0.11961311768544347, -0.032121153940495695, 0.083507449611237169, -0.14934051350543373, 0.011458799806668571, 0.10686114273573223, -0.10744074888919529, -0.04377919611962218, -0.11030520381111848, 0.20804878441910996, 0.093076545941202266, -0.11621182490336268, -0.1991656830436305, 0.10751579348978244, -0.11251544991606161, -0.12237925866716787, 0.058218707869711672, -0.15829276019021085, -0.17670038891466042, -0.2718416170070046, 0.034569320955166689, 0.30443575821424784, 0.061833358712886512, -0.19622498672259481, 0.011373612000361868, -0.050225612756453063, -0.036157087079788507, 0.12961127491373764, 0.13962576616751521, -0.0074232793168017737, 0.020964263007044792, -0.11185114399382942, 0.012502493042694894, 0.17834208513561048, -0.072658227462517586, -0.041312719401168194, 0.25095899873658228, -0.056628625839948654, 0.10285118379090961, 0.046701753217923012, 0.042323612264896691, 0.0036216247826814651, 0.066720707440062574, -0.16388990533979317, -0.0193739396421925, 0.027835704435251261, -0.086023958105789985, -0.05472404568603164, 0.14802298341926776, -0.10644183582381199, 0.098863413851512108, 0.00061285014778963834, 0.062096107555063146, 0.051960245755157973, -0.099548895108072383, -0.058173993112225285, -0.065454461562790375, 0.14721672511414477, -0.25363486848379435, 0.20384312381869868, 0.16890435312923632, 0.097537552447695477, 0.087824966562421697, 0.091438713434495431, 0.093809676797766431, -0.034379941362299417, -0.085149037210564868, -0.24900743130006289, 0.021165960517368819, 0.076710369830068792, -0.0061752907196549996, 0.028413473285342519, -0.029983982541843465]
# dlib预测器
detector = dlib.get_frontal_face_detector()
predictor = dlib.shape_predictor('shape_predictor_68_face_landmarks.dat')
# 创建cv2摄像头对象
cap = cv2.VideoCapture(0)
# cap.set(propId, value)
# 设置视频参数,propId设置的视频参数,value设置的参数值
cap.set(3, 480)
def get_128d_features(img_gray):
dets = detector(img_gray, 1)
if (len(dets) != 0):
shape = predictor(img_gray, dets[0])
face_descriptor = facerec.compute_face_descriptor(img_gray, shape)
else:
face_descriptor=0
return face_descriptor
# cap.isOpened() 返回true/false 检查初始化是否成功
while (cap.isOpened()):
# cap.read()
# 返回两个值:
# 一个布尔值true/false,用来判断读取视频是否成功/是否到视频末尾
# 图像对象,图像的三维矩阵
flag, im_rd = cap.read()
# 每帧数据延时1ms,延时为0读取的是静态帧
kk = cv2.waitKey(1)
# 取灰度
img_gray = cv2.cvtColor(im_rd, cv2.COLOR_RGB2GRAY)
# 人脸数rects
rects = detector(img_gray, 0)
# print(len(rects))
# 待会要写的字体
font = cv2.FONT_HERSHEY_SIMPLEX
cv2.putText(im_rd, "q: quit", (20, 400), font, 0.8, (0, 255, 255), 1, cv2.LINE_AA)
if (len(rects) != 0):
# 检测到人脸
# 将捕获到的人脸提取特征和内置特征进行比对
features_rd = get_128d_features(im_rd)
compare = return_euclidean_distance(features_rd, features_mean_default_person)
im_rd = cv2.putText(im_rd, compare.replace("same", "default_person"), (20, 350), font, 0.8, (0, 255, 255), 1, cv2.LINE_AA)
# 矩形框
for k, d in enumerate(rects):
# 绘制矩形框
im_rd = cv2.rectangle(im_rd, tuple([d.left(), d.top()]), tuple([d.right(), d.bottom()]), (0, 255, 255), 2)
cv2.putText(im_rd, "faces: " + str(len(rects)), (20, 50), font, 1, (0, 0, 255), 1, cv2.LINE_AA)
else:
# 没有检测到人脸
cv2.putText(im_rd, "no face", (20, 50), font, 1, (0, 0, 255), 1, cv2.LINE_AA)
# 按下q键退出
if (kk == ord('q')):
break
# 窗口显示
cv2.imshow("camera", im_rd)
# 释放摄像头
cap.release()
# 删除建立的窗口
cv2.destroyAllWindows()
实时输出结果:
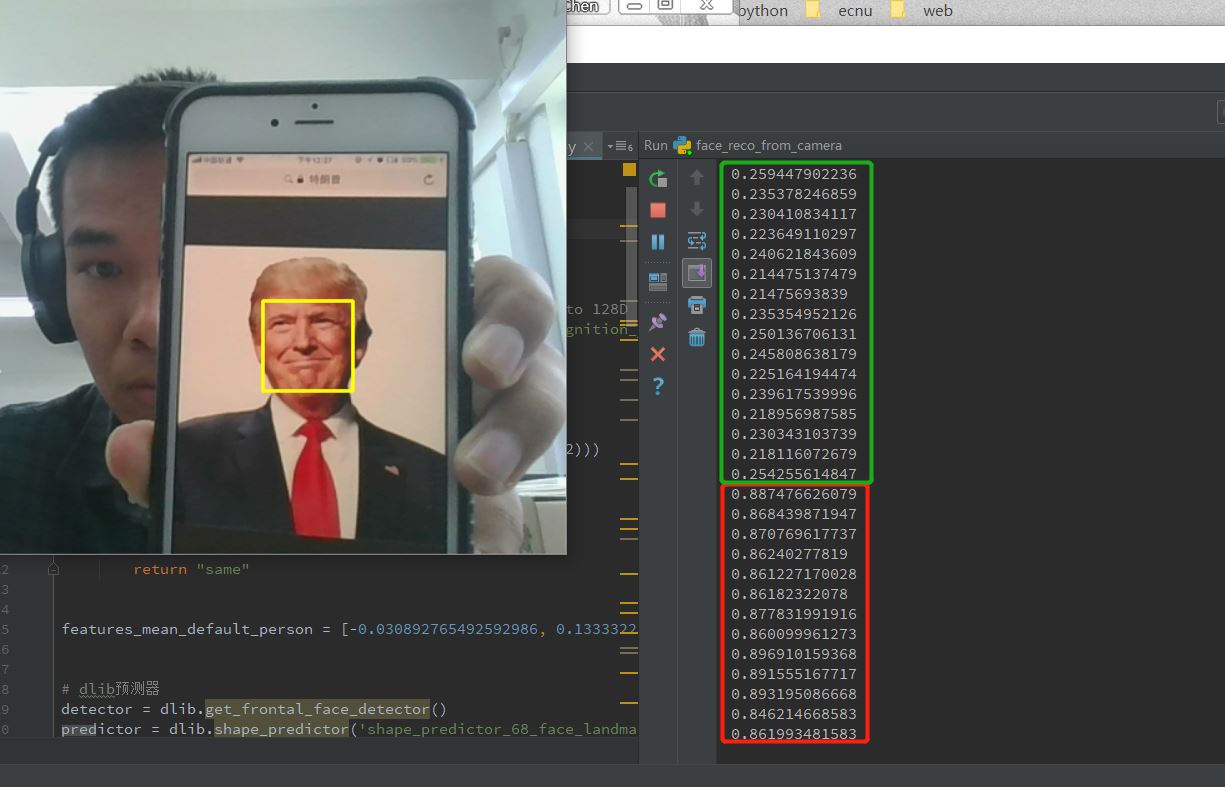
图6 实时输出的欧氏距离结果
通过实时的输出结果,看的比较明显;
输出绿色部分:当是我自己(即之前分析提取特征的default_person)时,计算出来的欧式距离基本都在0.2 左右;
输出红色部分:而换一张图片上去比如特朗普,明显看到欧式距离计算结果达到了0.8,此时就可以判定,后来这张人脸不是我们预设的人脸;
所以之前提到的欧式距离计算对比的阈值可以由此设定,本项目中取的是0.4;
3.总结
之前接着那个摄像头人脸检测写的,不过拖到现在才更新,写的也比较粗糙,大家有具体需求和应用场景可以加以修改,有什么问题可以留言或者直接mail 我。。。不好意思
核心就是提取人脸特征,然后计算欧式距离和预设的特征脸进行比对;
不过这个实时获取摄像头人脸进行比对,要实时的进行计算摄像头脸的特征值,然后还要计算欧氏距离,所以计算量比较大,可能摄像头视频流会出现卡顿;
# 代码已上传到了我的GitHub,如果对您有帮助欢迎star下:https://github.com/coneypo/Dlib_face_recognition_from_camera
以上就是本文的全部内容,希望对大家的学习有所帮助,也希望大家多多支持【听图阁-专注于Python设计】。