详解python-图像处理(映射变换)
做计算机视觉方向,除了流行的各种深度学习算法,很多时候也要会基础的图像处理方法。
记录下opencv的一些操作(图像映射变换),日后可以方便使用
先上一张效果图
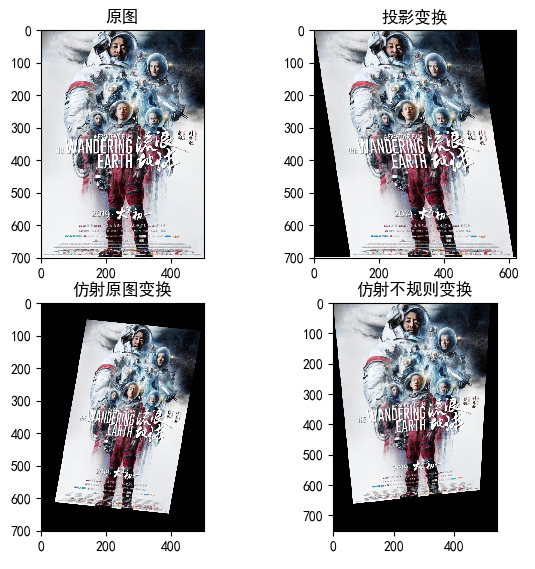
图二和图三是同一种方法,只是变换矩阵不同,都是3点映射变换
图四使用的是4点映射变换
简单介绍下原理
图像都知道是3维(通道)的矩阵,前两维就是由1字节(0-255)数字填充的二维数组。数字大小代表颜色的深浅。
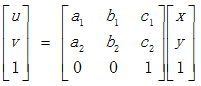
我们把变换前的原图作为x和y。变换后的图为u和v。将[x,y,1]乘上变换矩阵就可以得到对应的新的u和v。不同的变换矩阵有不同的作用(不同的变换方式)
所以现在就是求不同变换对应的不同的变换矩阵的过程
求这个矩阵 在opencv中直接就有方法
只需提供原图的三个点和你要变换之后的三个点的映射位置(3个原图点,3个映射点)就可以求出这个变换矩阵
当然了 你会发现不管怎么调整映射点 都不能任意变换
因为只给三个点时 变换之后的图其实只是原图的等比缩放,并不能做到随意映射的效果
这里opencv也提供了 四个点和四个映射的方法 求出对应的变换矩阵 ,最终得到任意映射的效果

代码如下:
# coding=gbk
import cv2
import numpy as np
import matplotlib.pyplot as plt
plt.rcParams['font.sans-serif']=['SimHei'] #用来正常显示中文标签
plt.rcParams['axes.unicode_minus']=False #用来正常显示负号
img=cv2.imread(r"test6.jpg")
img = img[:,:,[2,1,0]]
cols,rows,ch=img.shape
pts1 = np.float32([[0, 0], [cols - 1, 0], [0, rows - 1]]) #三点映射
pts2 = np.float32([[0, 0], [cols - 1, 0], [80, rows - 1]])
pts21 = np.float32([[0, 0], [cols - 1, 0], [0, rows - 1]])
pts22 = np.float32([[cols * 0.2, rows * 0.1], [cols * 0.9, rows * 0.2], [cols * 0.1, rows * 0.9]])
pts31 = np.float32([[0, 0], [cols - 1, 0], [0, rows - 1],[cols - 1,rows-1]]) #四点映射
pts32 = np.float32([[0, 0], [cols - 1, 0], [50, rows - 1],[cols - 50,rows-50]])
M = cv2.getAffineTransform(pts1,pts2) #求三点映射的变换矩阵
M2= cv2.getAffineTransform(pts21,pts22)
M3 = cv2.getPerspectiveTransform(pts31,pts32) #求四点映射的变换矩阵
dst = cv2.warpAffine(img,M,(rows+120,cols)) #三点映射的变换函数
dst2 = cv2.warpAffine(img,M2,(rows,cols))
dst3 = cv2.warpPerspective(img,M3,(rows+40,cols+50)) #四点映射的变换函数
plt.subplot(221)
plt.imshow(img)
plt.title("原图")
plt.subplot(222)
plt.imshow(dst)
plt.title("投影变换")
plt.subplot(223)
plt.imshow(dst2)
plt.title("仿射原图变换")
plt.subplot(224)
plt.imshow(dst3)
plt.title("仿射不规则变换")
plt.show()
以上所述是小编给大家介绍的python-图像处理(映射变换)详解整合,希望对大家有所帮助,如果大家有任何疑问请给我留言,小编会及时回复大家的。在此也非常感谢大家对【听图阁-专注于Python设计】网站的支持!