OpenCV3.0+Python3.6实现特定颜色的物体追踪
一、环境
win10、Python3.6、OpenCV3.x;编译器:pycharm5.0.3
二、实现目标
根据需要追踪的物体颜色,设定阈值,在视频中框选出需要追踪的物体。
三、实现步骤
1)根据需要追踪的物体颜色,设定颜色阈值,获取追踪物体的掩膜
代码:generate_threshold.py
# -*- coding : utf-8 -*-
# Author: Tom Yu
import cv2
import numpy as np
cap = cv2.VideoCapture(0)#获取摄像头图像
# img = cv2.imread("timg1.jpg")
# hsv_img = cv2.cvtColor(img,cv2.COLOR_BGR2HSV)
def nothing(x):
pass
def createbars():
"""
实现创建六个滑块的作用,分别控制H、S、V的最高值与最低值
"""
cv2.createTrackbar("H_l","image",0,180,nothing)
cv2.createTrackbar("H_h","image",0,180,nothing)
cv2.createTrackbar("S_l","image",0,255,nothing)
cv2.createTrackbar("S_h","image",0,255,nothing)
cv2.createTrackbar("V_l","image",0,255,nothing)
cv2.createTrackbar("V_h","image",0,255,nothing)
cv2.namedWindow("image")
createbars()#创建六个滑块
lower = np.array([0,0,0])#设置初始值
upper = np.array([0,0,0])
while True:
ret,frame = cap.read()
hsv_frame = cv2.cvtColor(frame,cv2.COLOR_BGR2HSV)#将图片由BGR颜色空间转化成HSV空间,HSV可以更好地分割颜色图形
lower[0]=cv2.getTrackbarPos("H_l","image")#获取"H_l"滑块的实时值
upper[0]=cv2.getTrackbarPos("H_h","image")#获取"H_h"滑块的实时值
lower[1]=cv2.getTrackbarPos("S_l","image")
upper[1]=cv2.getTrackbarPos("S_h","image")
lower[2]=cv2.getTrackbarPos("V_l","image")
upper[2]=cv2.getTrackbarPos("V_h","image")
mask = cv2.inRange(hsv_frame,lower,upper)#cv2.inrange()函数通过设定的最低、最高阈值获得图像的掩膜
cv2.imshow("img",frame)
cv2.imshow("mask",mask)
if cv2.waitKey(1)&0xff == 27:
break
cv2.destroyAllWindows()
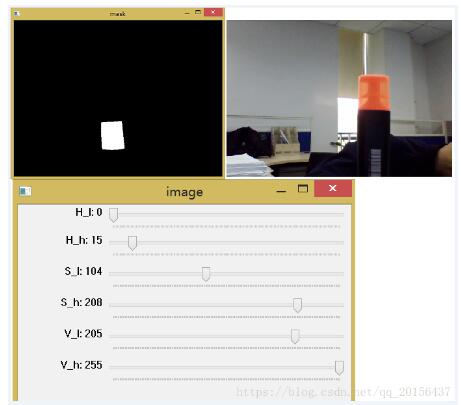
实现效果:获取需要追踪的物体颜色阈值
2)根据获取到的阈值,设定阈值范围,在视频中追踪特定颜色的物体并用框选框出所需追踪的物体
代码:tracking_object.py
# -*- coding : utf-8 -*-
# Author: Tom Yu
import cv2
import numpy as np
cap = cv2.VideoCapture(0)#获取摄像头视频
while True:
ret,frame = cap.read()#读取每一帧图片
hsv_frame = cv2.cvtColor(frame,cv2.COLOR_BGR2HSV)#将每一帧图片转化HSV空间颜色
"""
依据之前的脚本获取的阈值设置最高值与最低值
"""
lower = np.array([0,104,205])
upper = np.array([15,208,255])
mask = cv2.inRange(hsv_frame,lower,upper)
img,conts,hier = cv2.findContours(mask,cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE)#找出边界
cv2.drawContours(frame,conts,-1,(0,255,0),3)#画出边框
dst = cv2.bitwise_and(frame,frame,mask=mask)#对每一帧进行位与操作,获取追踪图像的颜色
#cv2.imshow("mask",mask)
#cv2.imshow("dst",dst)
cv2.imshow("frame",frame)
if cv2.waitKey(1)&0xff == 27:
break
cv2.destroyAllWindows()
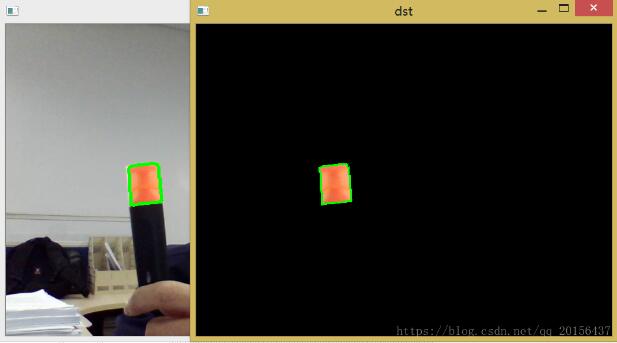
实现效果:
以上就是本文的全部内容,希望对大家的学习有所帮助,也希望大家多多支持【听图阁-专注于Python设计】。